Part 12 - The Big Search
One thing was certain. It was going to be much harder to verify than Jussi Peltola’s case. The car was presumed to be 80 meters from the shore and we didn’t have a boat. I was still not convinced by the idea of getting one.
Jussi Peltola’s case proved that we had a working formula. Doing the first check with a magnet was a good idea. It was just much harder applying it to this case. Being an estimated 80 meters from the shore and at least 25 meters deep meant that attaching the magnet would be much harder, even if we knew the exact location. And how to actually do it?
Throwing a magnet was out of the question. The distance was just too great. What if we tried a pneumatic gun, like potato gun? Checking the legislation I had to rule this option out as a pneumatic gun would be considered a weapon in Finland. Not to mention it wasn’t practically viable. No matter what I tried to think of, it always reverted back to the fact that we needed a boat. After a few weeks, I finally relented.
Luckily, a friend of mine was open to the idea of buying one together. We didn’t have much storage space available so we decided to buy an inflatable boat with an outboard engine. Boats were in high demand during those covid days. But luck was once again on my side as I found one model on sale from a large boating store. It was a bit bigger than the one I had originally planned to get but it turned out to be a good thing.
So, finally on a late summer afternoon, I had my new boat inflated in my living room. That was also the day I learned that inflating a boat is the easy part. Deflating it and packing it away is the hard part.
 The boat unpacked for the first time
The boat unpacked for the first time
We had only one shot before the winter, so we’d have to get it right on the first try. I started to do mental exercises, going through what we needed to do, what could go wrong, and what things we would need. It turned out to be a really good idea. Tha was how we ended having a backup system for almost equipment we had.
There was lots of construction to do. The sonar had to be taken out of the RC-boat and I needed to build a mounting point for it. Once again IP45 graded storage boxes proved to be useful. This time it was used to mount the sonar. The transducer also needed a mounting point. That one was a bit harder. In the end I used the left over pipe from the ROV wet hull and a clamp to attach the pipe to the boat.
After a few days of planning and building, I was confident we were good to go. By chance it was the 26th of August. The same day Juha went missing 15 years before.
The Search
On Friday, the 26th of August, I once again stopped my car at spot 2. The weather was different. Gone were the hot summer days. Instead it was cold autumn day with a cold wind. At the shore I checked the heading which I had got from the sonar. I marked it on the ground using white pipes to help us see the line from the boat. The heading was spot on; it was direct extension of the road.
It was the boat’s maiden voyage. The sonar’s new equipment worked well. I bought an outboard engine for the boat, but there was so much gear, there wasn’t enough room for it in the car.
It was time to start the search. I amped up the sonar’s sensitivity and started to row the boat keeping the sewer pipe markers on the shore in line. The sonar image wasn’t as good as it was while using the RC-boat. Rowing stirred the waters and the transducer, which wasn’t deep enough, and picked up the swirls.
It didn’t take long for the grooves to appear on the sonar. I continued rowing while trying to watch the screen. The tracks on the screen just kept going on. I kept on rowing. The tracks seemed endless. After an impossibly long distance the sonar finally displayed some hard object on the bottom of the lake, just next to where the tracks ended. Looking at the shore in the distance, it felt impossible that the car could be so far. The sonar showed we were almost 100 meters from the shore. We decided to take a quick break and have a late lunch.
I checked the sonar recording on the computer in my car while having lunch. There was indeed a 2m x 5m rectangular hard surface, which could be a car. It was 26-28 meters deep so the sonar image was flat, making the height estimation impossible.
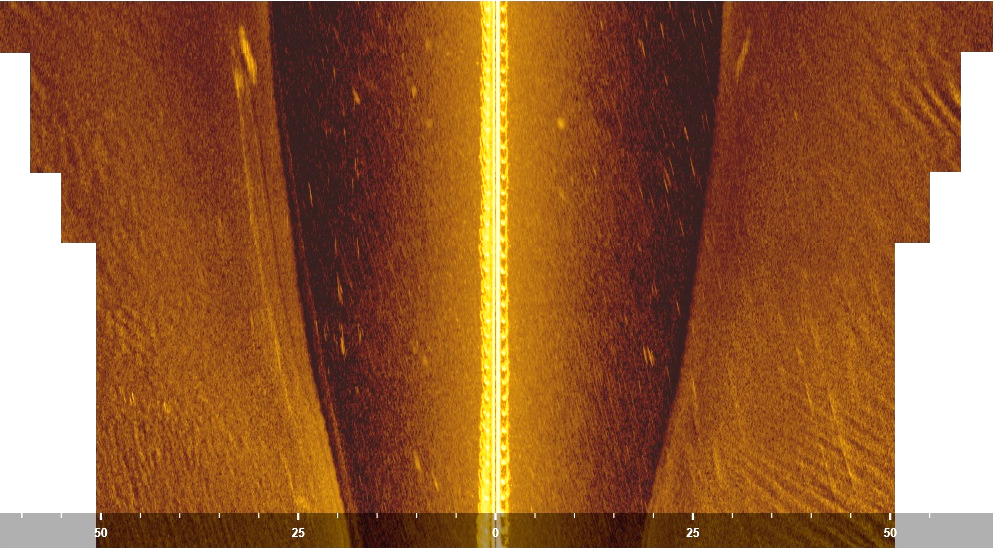 The grooves on the left.
The grooves on the left.
I took notes of the coordinates where the tracks ended and I got a different result to the sonar screen. The difference was a significant, well over 100 meters. I couldn’t understand why the big difference. I chose to believe the computer’s information and use it as a starting point.
We decided to tow the magnet and row in a pattern large enough to cover the whole area. We had two magnets with us: a bigger one to make the first contact easier and more secure and a smaller one in case we needed to attach a buoy.
We took off and found the tracks again. At the end of the tracks we started towing the big magnet. I tried to make a nice and tight pattern but the wind was picking up and it kept pushing the boat off the line. The boat had a small hull but it was far from perfect in the rising wind.
After two hours, there wasn’t much talking in the boat. It was obvious that this was the moment of the truth for our theory. No matter how good theory and sonar images we had, the magnet would not catch if there were no car. We never spoke about how long we would keep trying if the magnet did not catch. But at this point, I didn’t want to think about it. I just kept rowing.
After two hours and fourteen minutes, we came to an abrupt stop. The magnet had caught onto something.
The big magnet was attached now, but we needed to get a smaller magnet attached, so we could attach a buoy. It took more than 30 minutes to get it caught, even though we already had one magnet attached. A depth of 30 meters and the wind made the seemingly simple job challenging.
 Trying to attach the second magnet
Trying to attach the second magnet
With the buoy finally marking the spot, we decided to set up camp as it was getting late.
 The small white spot on the left is a 20cm (8”) diameter Styrofoam bouy.
The small white spot on the left is a 20cm (8”) diameter Styrofoam bouy.
I had my small tent with me, which I pitched at the end of road. The night was cold and eerily quiet. The only sound was the wind in the trees and a lonely loon lamenting on the lake.
 The camp next morning.
The camp next morning.
Searching with the ROV
We woke up to a bright, cloudless sunny morning. It was bad news for piloting the ROV as there was no cover in the boat. No hiding under a bridge like when piloting in the previous search.
We started by getting new sonar images of the tracks. Even though we did our very best, we couldn’t get even the same quality as the day before. The wind had picked up even more, making the swells bigger.
The time had arrived. I prepared the ROV. This time all the cameras were working. The setup was also different this time and the cameras provided almost 360 degrees video around the ROV. There was also a GoPro shooting the video, just in case.
The night before, we had attached pieces of reflective tape to the anchor rope, spaced more or less 1 meter apart to make the descent easier. I also got an idea to row the boat against the wind and start doing a zigzag pattern until the magnet caught. It worked well. This time the magnet caught almost immediately.
Once again, I started to get nervous. Not because I was afraid of losing the ROV but because of the consequences. If the ROV was lost, we would have no means to continue the search this year. Waiting another 3/4 of a year would be complete and utter agony.
The first step was to get the ROV into the water. Then I double, triple, quadruple checked everything. Everything was working well and I finally armed the engines. It was time to start the descent.
The reflective tapes turned out to be an excellent idea because without it I could see next to nothing from the laptop’s screen, and the ROV didn’t want to go down in a straight line. It wasn’t in balance and didn’t have neutral buoyancy. On the surface it floated but in deeper it sank.
After 4 meters, when the sunlight started to fade, I remembered that the ROV had never been so deep. I could only hope it would withstand the pressure. It was designed to handle the pressure at 100 meters, but it was never tested at that depth.
At 8 meters it was completely dark, and the water temperature started to drop. The water was clear and visibility was good but the natural light was fading.
At 25 meters, after four minutes of descending, the ROV finally hit the bottom. I had absolutely no idea what we had found.
It was actually a strange thing. The Field of View of the camera was around 120 degrees, making even the small objects look enormous. I couldn’t make out anything from the image to use as a scale. The little what I could see from the laptop screen in the direct sunlight, was all gray material which looked like concrete.
I started to drive around it, whatever it was. Once I saw the tires it was pretty much sealed. It was a car.
The next thing was to get an image of the license plate. I drove around for about 20 minutes, but then got lost. I strayed away from the car and hit the bottom. Hitting the bottom caused an explosion of dust particles. The visibility was gone instantly so we brought the ROV back to the surface and made a new descent.
After searching for an hour we gave up. Apparently, the car was buried too deep and I couldn’t get the ROV to the correct position to see the license plate. In any case, we couldn’t get 100% identification. It was a bit of a let down.
I had been piloting the ROV for more than an hour, and I was exhausted. I was ready to call it a day and go to bed. It was time for a break.
We watched the ROV video material in the shade and there was no question about it. It was a car, upside down, and at least half way buried in the bottom.
It was now Friday afternoon and there wasn’t anything more we could do but call the police.
Juha Laitinen’s case was transferred from the local police to the National Bureau of Investigation (KRP) in 2017, when the murder investigation started. I called the detective inspector in charge of the case. I introduced myself as one of the guys who found Jussi Peltola. This got his attention. After giving him the short version of our findings, I could hear the big wheels being pushed into motion. He said he was a two hours drive away but that he would immediately leave with his team.
It was going take some time for them to arrive, and I was exhausted. I tried to sleep in my car. After tossing and turning for 10 minutes or so, I gave up. It must have been the excitement which made it difficult to relax.
We started to pack the gear. The buoy was still attached to the car with the magnet. We decided to leave the buoy attached. It would make the divers’ job much easier.
The first part of the team arrived after we had finished packing and were enjoying another cup of coffee. After a while the inspector and the detective sergeant arrived. We handed over all the information we had. They also watched the videos, and went to see the actual place from the shore. You could sense their disbelief when they saw distance to the buoy. From where we were standing, it was almost impossible to believe a car could have ended up so far.
It was clear these people were top level professionals and held us in high regard. They asked a couple of questions which were probably used to check what kind of lunatics we were. We were almost done with the briefing, when the soon-to-be-retiring detective exclaimed that this was more than a small miracle, and that he had never seen nothing like this in his career.